ยุคของหุ่นยนต์ผ่าตัด
หากให้ลองจิตนาการภาพของหุ่นยนต์ผ่าตัดที่ทุกคนรู้จัก หน้าตาที่คุ้นเคยคงหนีไม่พ้นหุ่นยนต์อย่าง da Vinci จากบริษัท Intuitive ที่มีชื่อเสียงในการพลิกโฉมการผ่าตัด ทำให้การผ่าตัดอย่างเช่น การผ่าตัดในช่องท้อง หรือ การผ่าตัดต่อมลูกหมาก ทำได้โดยแผลเล็กลง ลดการเสียเลือด และช่วยให้คนไข้ฟื้นตัวเร็วขึ้น เทียบกับการผ่าตัดแบบเปิด
หุ่นยนต์ในลักษณะนี้มีข้อดีคือช่วยเพิ่มความแม่นยำ ทำให้มือของศัลยแพทย์ควบคุมเครื่องมือได้นิ่งยิ่งขึ้น และมองเห็นพื้นที่การผ่าตัดได้กว้างยิ่งขึ้น
แต่ข้อจำกัดของมันคือมีขนาดใหญ่ ภายในเต็มไปด้วยชิ้นส่วนทางวิศวกรรมอย่างเกียร์ มอเตอร์ ฟันเฟือง และวงจรไฟฟ้า 
จุดกำเนิดหุ่นยนต์นิ่ม
(Soft Robot)
ในช่วงปี ค.ศ. 1990 ทีมวิจัยนำโดย Koichi Suzumori และคณะ ได้นำเสนอหุ่นยนต์ขนาดเล็กที่ทำจากวัสดุยืดหยุ่น หุ่นยนต์นี้มีรูปร่างเป็นท่อทรงกระบอกและภายในมีช่องว่าง เมื่อใส่ของเหลวเพิ่มความดันในช่องว่างเหล่านั้นจะสามารถควบคุมรูปร่างของหุ่นยนต์ให้โค้งงอได้
หุ่นยนต์ตัวนี้แตกต่างจากหุ่นยนต์อื่น ๆ ในอุตสาหกรรม ที่ทำจากโลหะ เชื่อมต่อด้วยข้อต่อและควบคุมด้วยมอเตอร์ หน้าตาน่าเกรงขาม แต่หุ่นยนต์ของ Suzumori มีขนาดเล็กเส้นผ่านศูนย์กลางลดลงได้ถึงระดับมิลลิเมตร
หุ่นยนต์นี้ฉีกภาพของหุ่นยนต์ที่เคยมีอยู่ และนำไปสู่การพัฒนาหุ่นยนต์นิ่ม (soft robot) เพื่อมาใช้ในหลายภารกิจรวมถึงการผ่าตัด 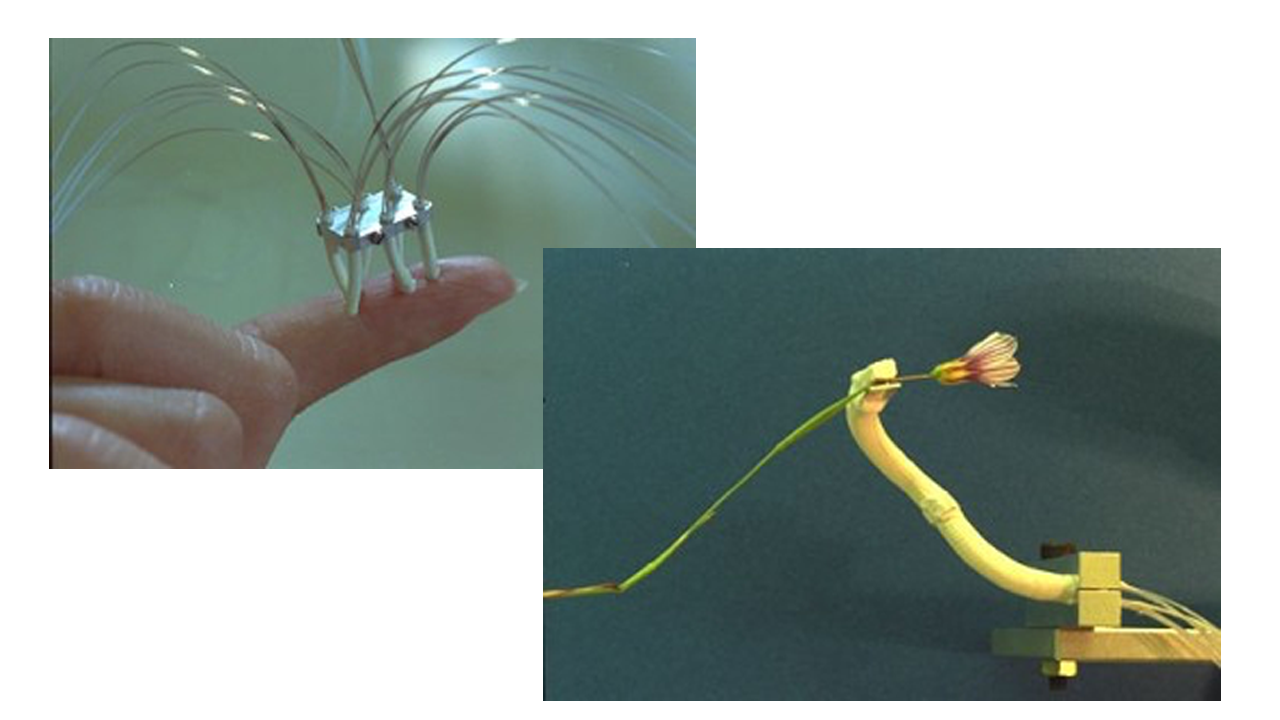
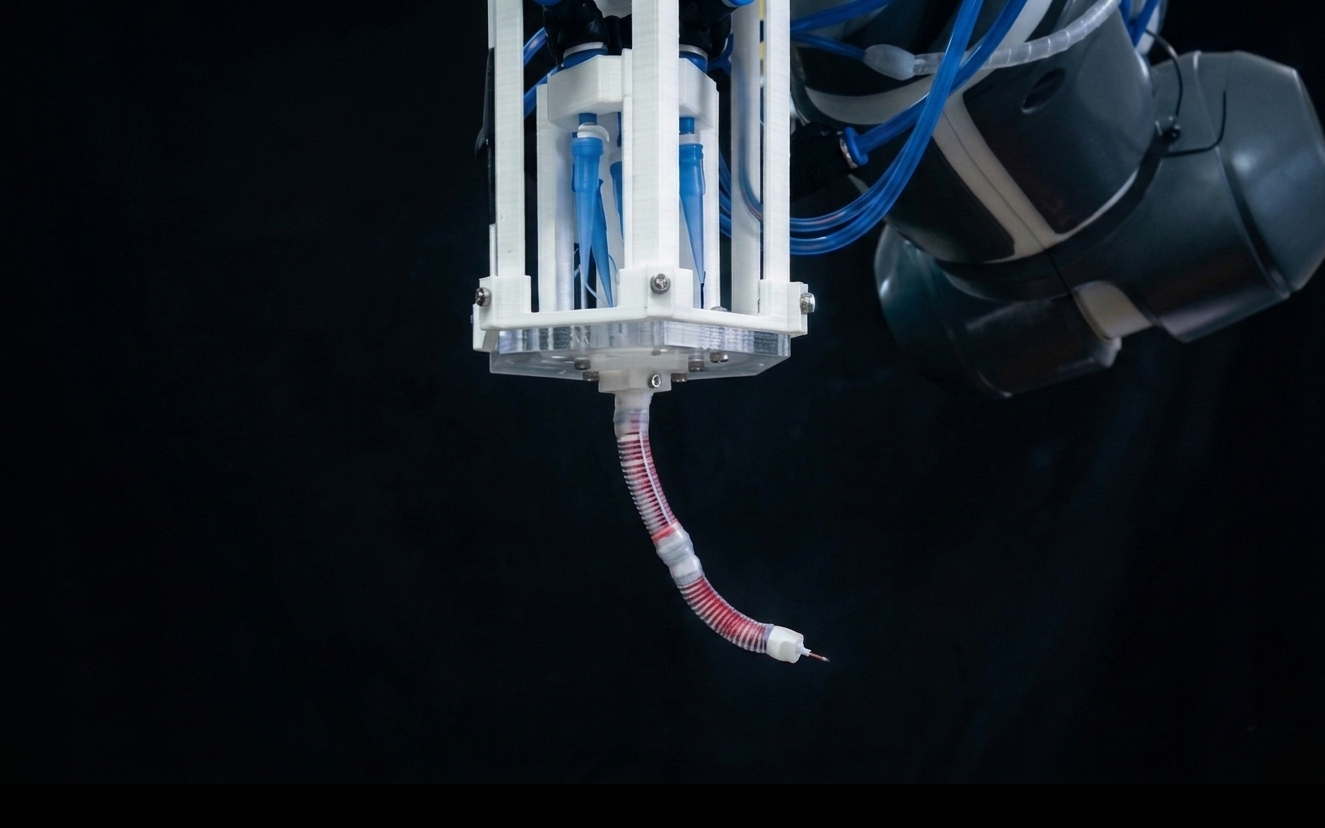
นุ่มนวลแต่เข้าถึงได้ลึกกว่า
จุดเด่นของหุ่นยนต์นิ่มคือมันทำจากวัสดุยืดหยุ่น เพิ่มความปลอดภัยขณะการผ่าตัดโดยลดการบาดเจ็บของเนื้อเยื่อหากเกิดการชนเกิดขึ้น นอกจานี้มันยังสามารถเปลี่ยนแปลงรูปร่างได้
นำไปสู่การพัฒนาหุ่นยนต์เพื่อผ่าตัดผ่านรูเปิดธรรมชาติ (natural orifice transluminal endoscopic surgery) ซึ่งเป็นการสอดเครื่องมือผ่าตัดผ่าน "ช่องทางธรรมชาติ" ทำให้ผ่าตัดโดยไร้การเปิดแผล อย่างเช่น การส่องกล้องลำไส้ใหญ่ทางทวารหนัก (colonoscopy) เพื่อวินิจฉัยและเก็บตัวอย่างเนื้องอกในลำไส้ใหญ่ หรือการผ่าตัดส่องกล้องหลอดลม (bronchoscopy) โดยให้หุ่นยนต์เดินทางผ่านทางเดินหายใจเข้าสู่หลอดลมฝอยภายในปอดเพื่อเก็บตัวอย่างชิ้นเนื้อในปอด
นอกจากนี้หุ่นยนต์นิ่มยังถูกนำเสนอให้ใช้ในการผ่าตัดแบบเปิดแผลเล็ก (minimally invasive surgery) เพื่อช่วยให้ศัลยแพทย์เข้าถึงอวัยวะในร่างกายที่ไม่สามารถเข้าถึงได้ด้วยเส้นทางตรง
อย่างเช่น เส้นเลือดที่มีความขดเคี้ยวซับซ้อน ผ่าตัดในช่องท้อง หรือการผ่าตัดสมองเป็นต้น 
ข้อจำกัดที่ยังต้องก้าวข้าม
ความยืดหยุ่นของวัสดุที่ใช้ทำหุ่นยนต์นิ่มปรียบเสมือนดาบสองคม ความยืดหยุ่นทำให้มันสามารถปรับรูปร่างให้เข้ากับโครงสร้้างที่ขดเคี้ยวได้แต่ก็นำมาซึ่งความท้าทายในการควบคุม นึกภาพหนังยางที่ถูกยืดซ้ำ ๆ หลาย ๆ ครั้ง ลักษณะการยืดหดของมันในครั้งที่หนึ่งพันคงย้วยกว่าการยืดหดในครั้งแรก
ความไม่แน่นอนนี้ทำให้การสร้างโมเดลทางคณิตศาสตร์จำลองการเคลื่อนไหวของมันเป็นเรื่องที่ท้าทายต้องอาศัยเซนเซอร์เพื่อนำมาวัดการยืดหดในลำตัวของหุ่นยนต์เพื่อนำมาคำนวณรูปร่างของหุ่นยนต์ การวางแผนการเคลื่อนไหวของหุ่นยนต์นิ่มที่มีความสามารถในการโค้งงอยังต้องอาศัยการพัฒนา
"จะทำยังไงถ้าเกิดความคาดเคลื่อนขณะทำการผ่าตัดจริง เช่น หุ่นยนต์ชนเข้ากับอวัยวะข้างเคียงแล้วเกิดการเปลี่ยนรูปร่าง หรือเส้นทางที่วางแผนไว้ไม่ตรงกับหน้างาน และจะปล่อยให้หุ่นยนต์ทำงานอัตโนมัติหรือให้ศัลยแพทย์เข้ามาร่วมควบคุม ทั้งหมดนี้ยังเป็นความท้าทายที่ทีมวิจัยกำลังหาคำตอบ"